2021-01-24T12:51:35




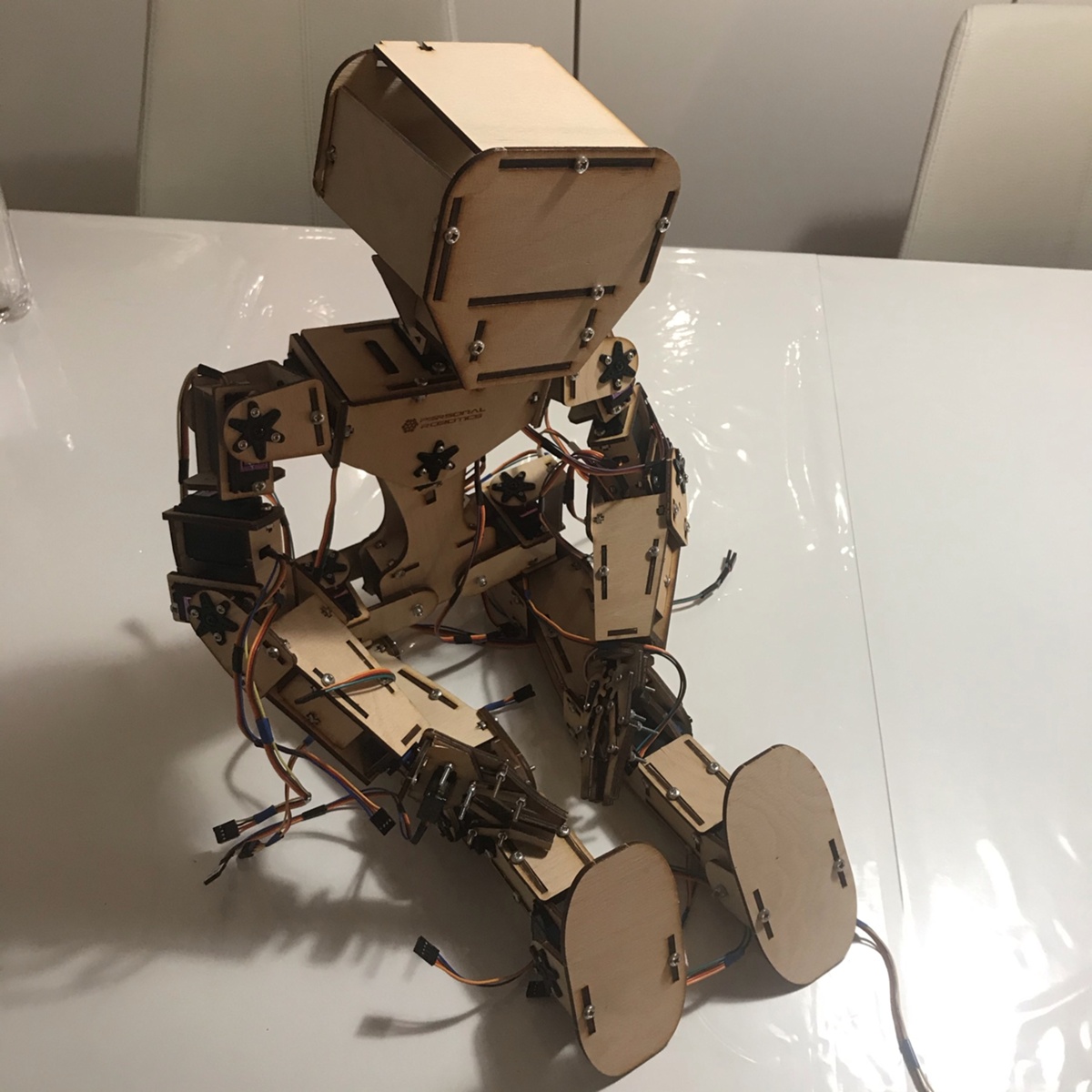
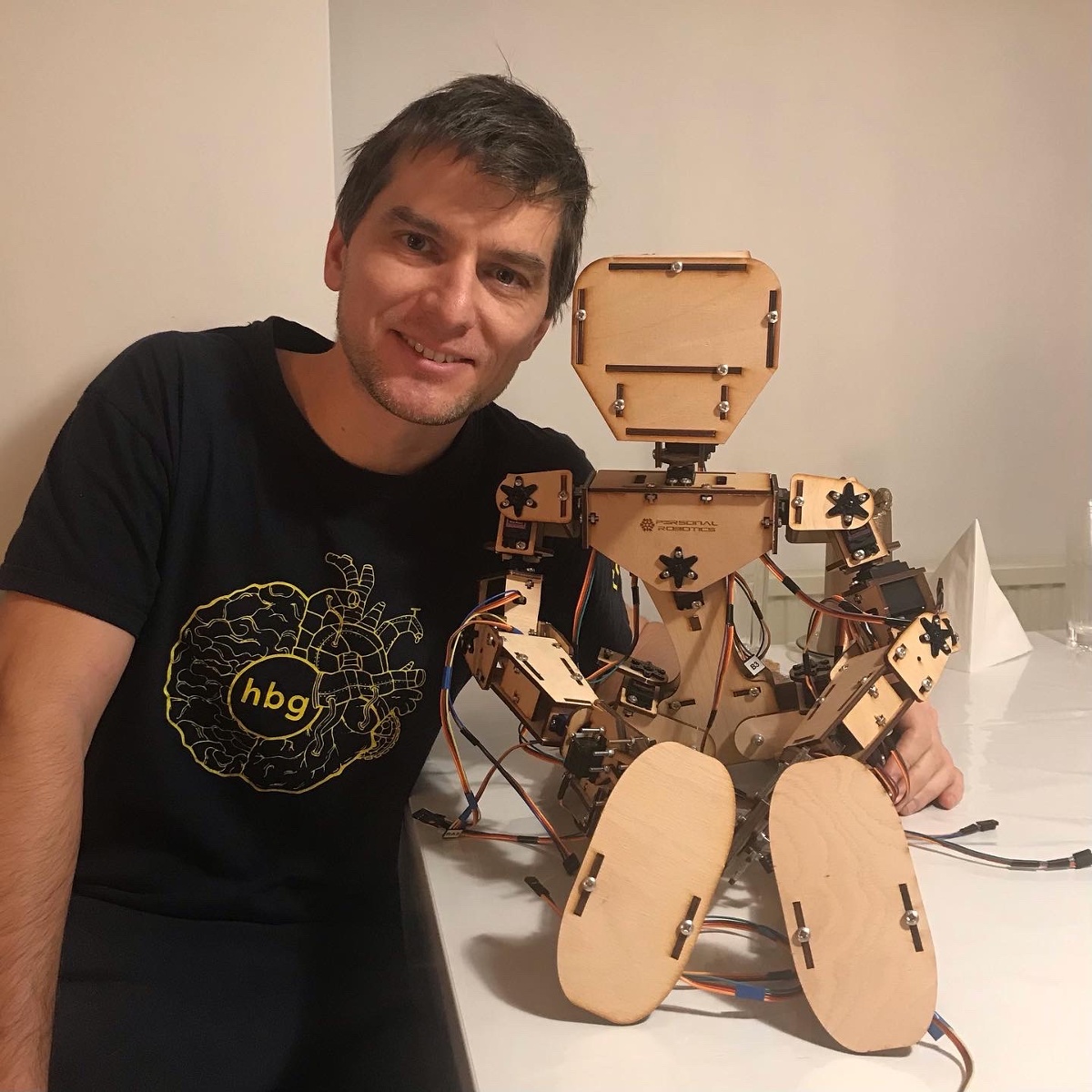
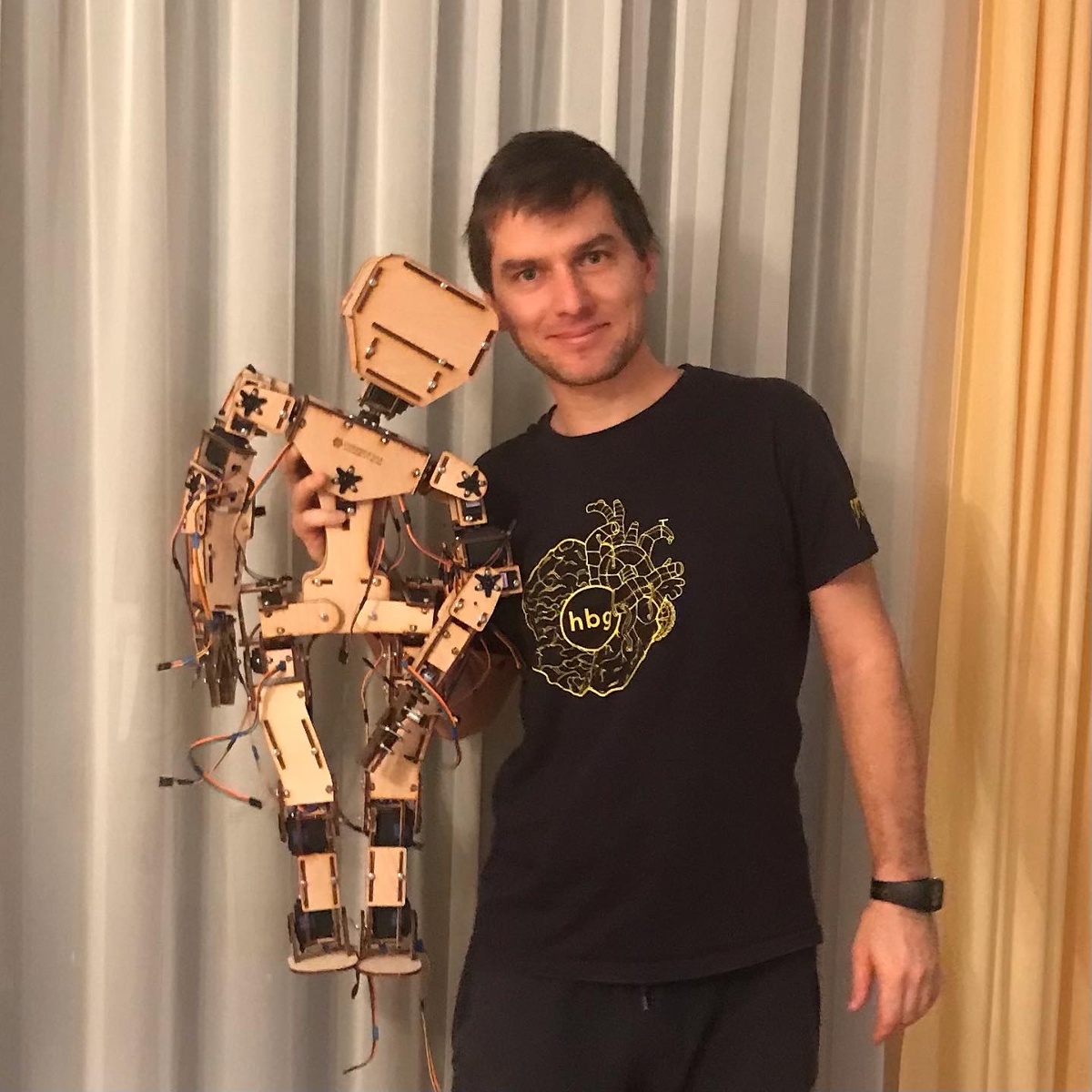

lIllI robot
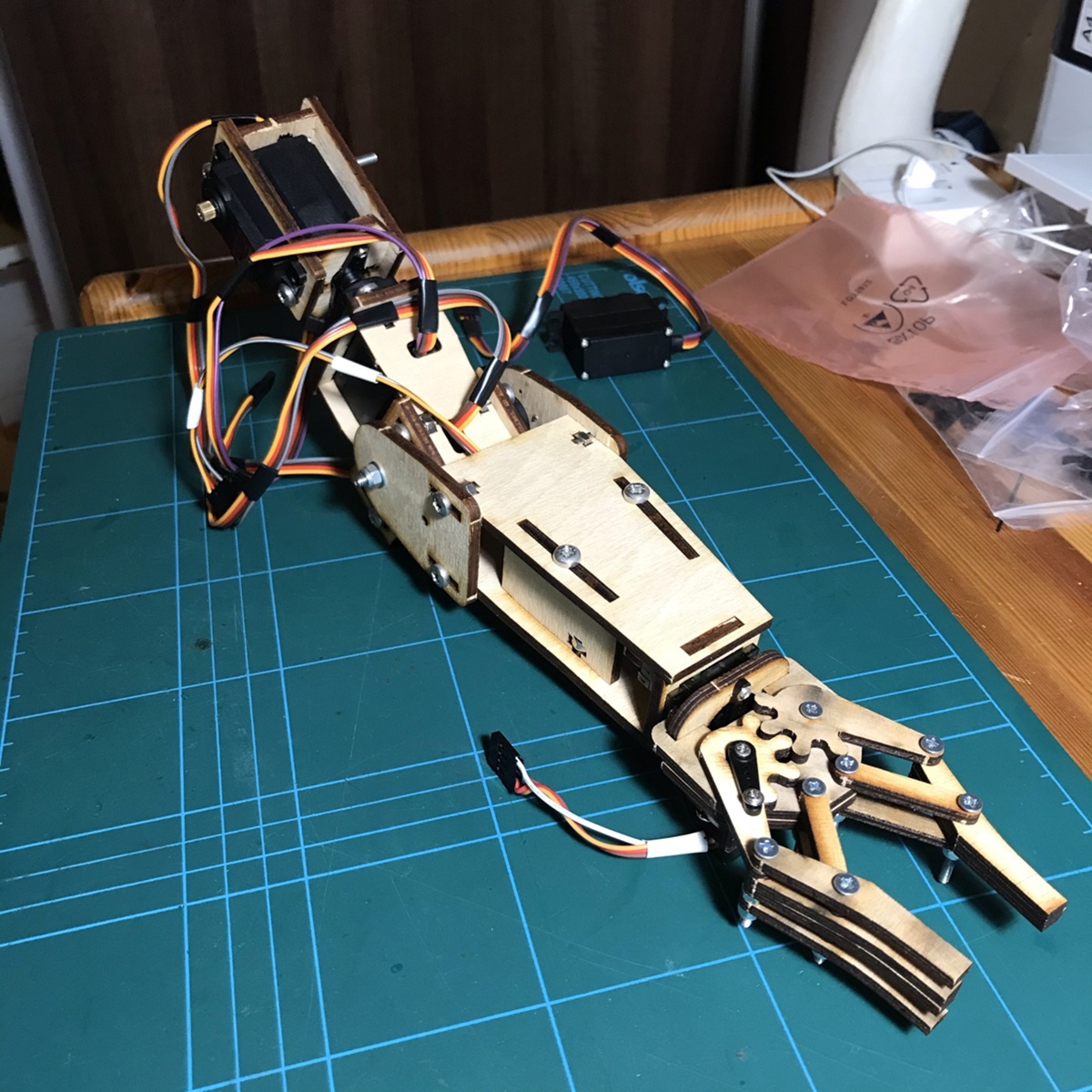
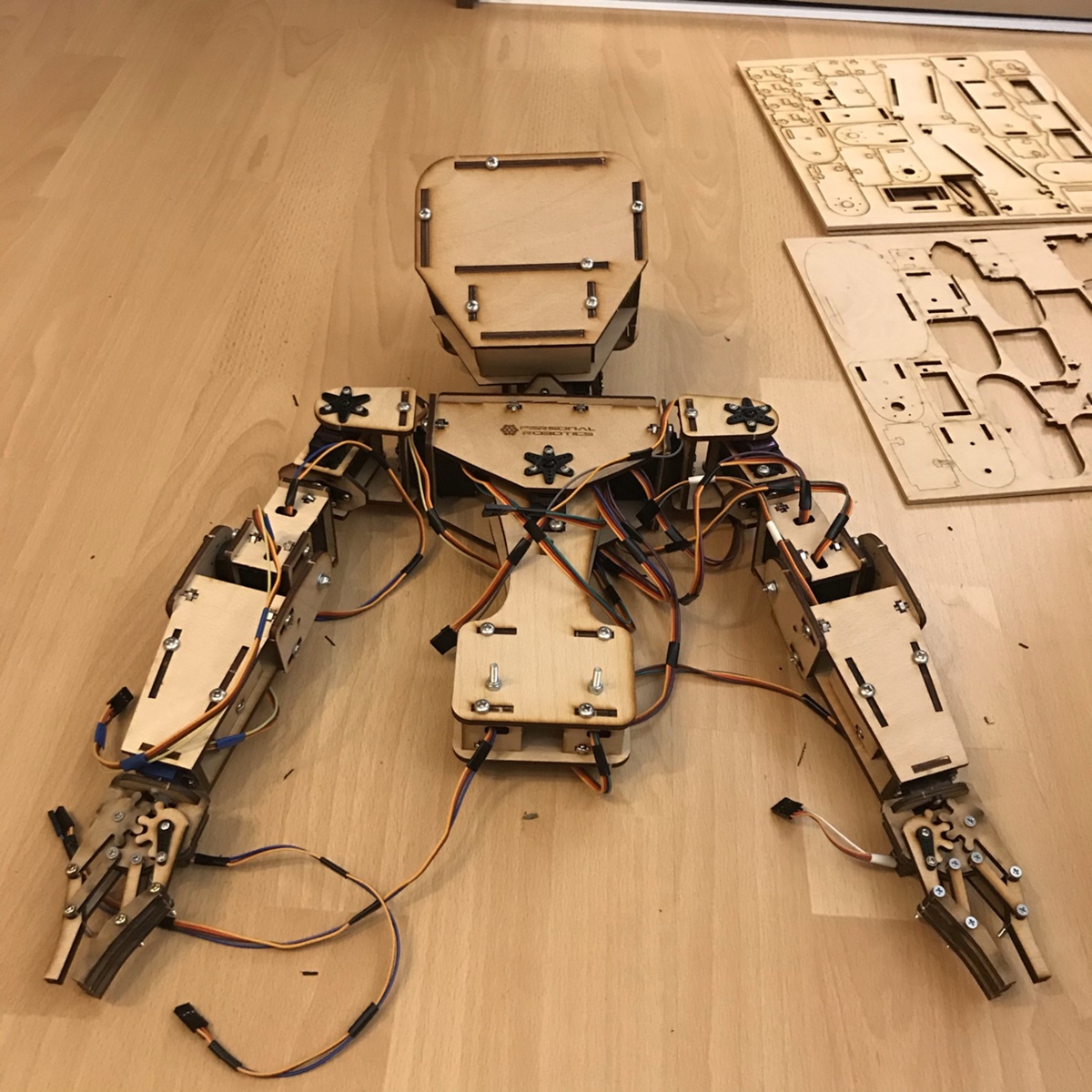
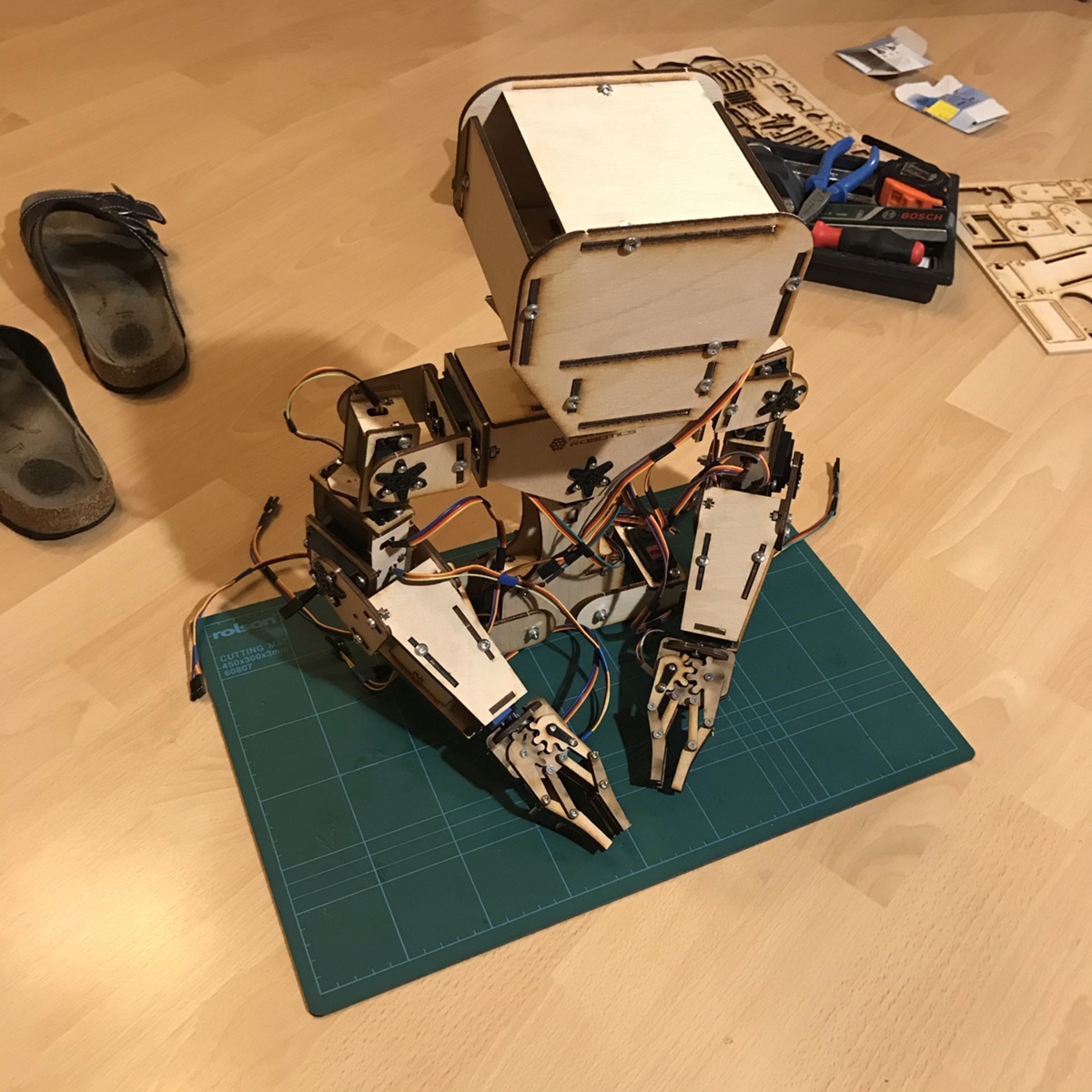
lIllI robot mechanically built based on https://www.personalrobotics.eu/lilli/.
{kind=link}
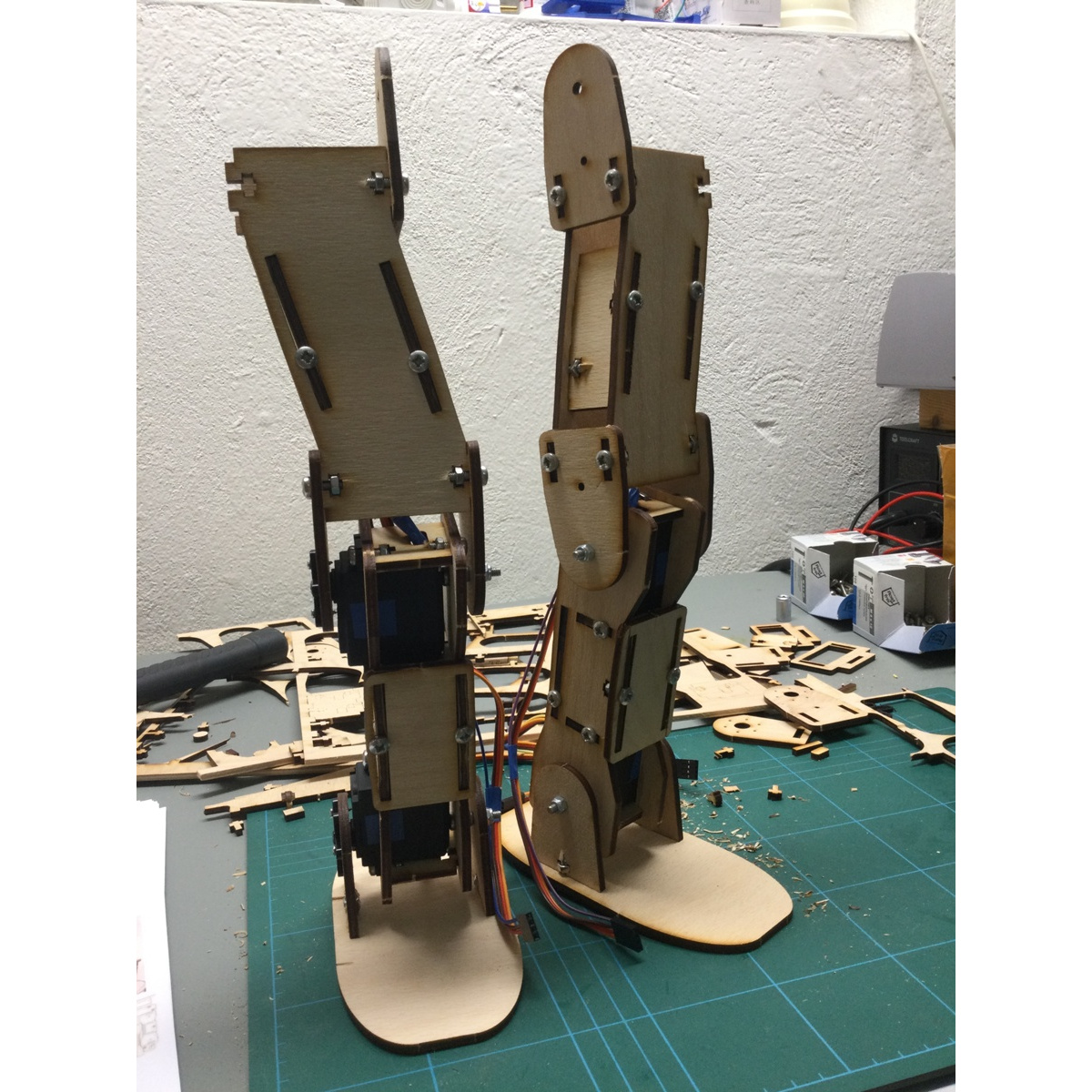
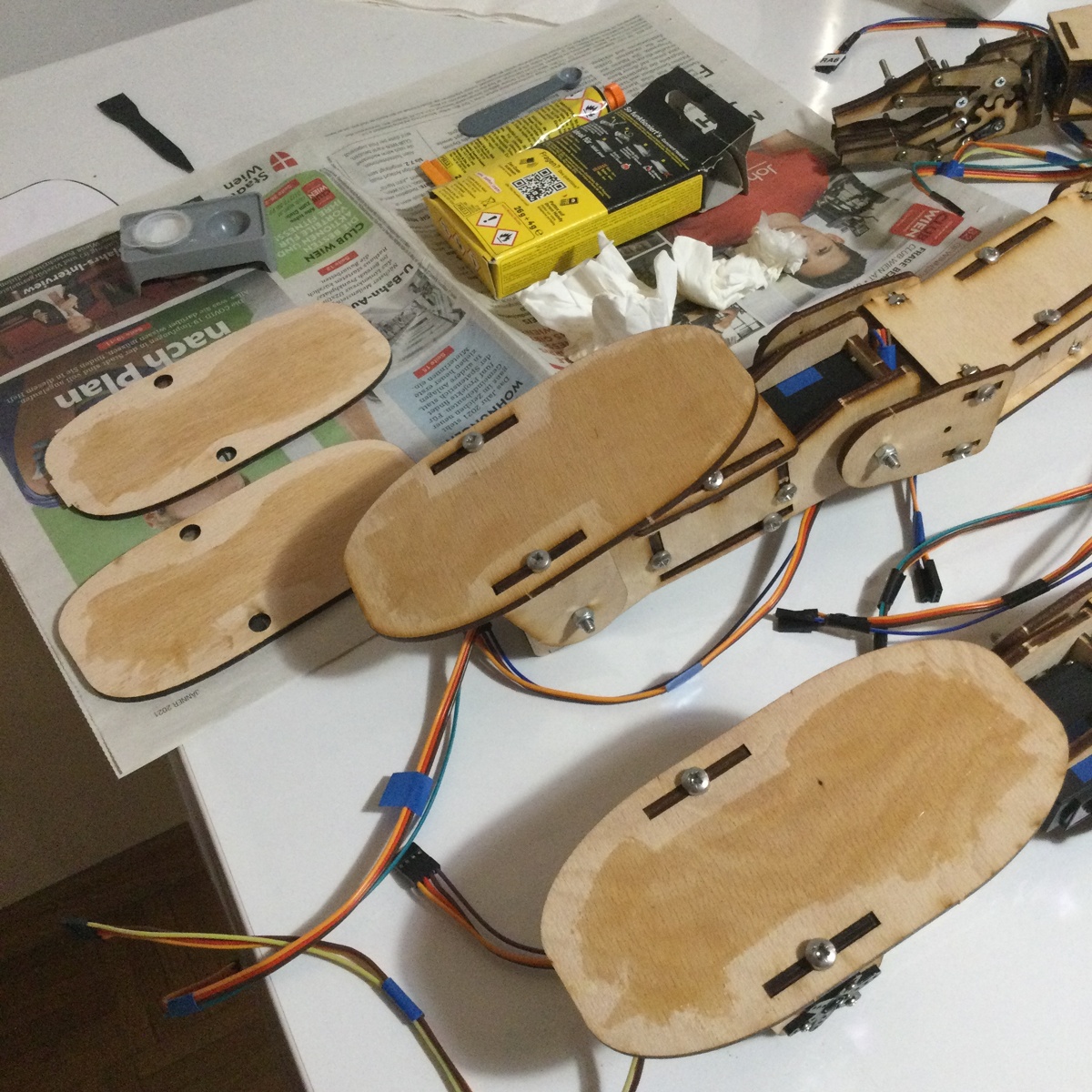
soles for the feets
Because the bolts have bin stucking out of the feet bottom, I've created and glued one more plywood layer on them:
What next?
Add electronics and programm software so that lIlII gets some "real" movement. That means redesign sixservo and use couple of those boards together with Raspberry Pi to control all of the 25 servos.
Will take some time...